EKF SLAM on a TurtleBot3
Built a full SLAM stack in ROS 2 from scratch: 2D geometry library, simulator, odometry, and Extended Kalman Filter SLAM with unknown data association, deployed on a real TurtleBot3.
Overview
Built a full SLAM stack from the ground up for a TurtleBot3 differential-drive robot in ROS 2. The robot uses a LIDAR to detect cylindrical landmarks and maintains a joint estimate of its own pose and all landmark positions.
The stack was cross-compiled for the TurtleBot3’s ARM processor (aarch64) and deployed live on the robot.
Packages
| Package | Role |
|---|---|
turtlelib | 2D rigid-body transforms and differential-drive kinematics |
nusim | ROS 2 simulator and visualizer for TurtleBot3 |
nuturtle_description | URDF and robot description files |
nuturtle_interfaces | Custom ROS 2 service definitions |
nuturtle_control | Odometry, low-level control |
nuslam | EKF SLAM with unknown data association |
Odometry
Wheel encoder readings are integrated via the differential-drive kinematic model in turtlelib to estimate the robot’s pose. Odometry accumulates drift over time, which the SLAM filter is designed to correct.
EKF SLAM
The Extended Kalman Filter tracks a joint state vector containing both the robot pose and all landmark positions:
Each timestep has two steps:
Predict — motion model
A control input (linear and angular velocity from wheel encoders) propagates the robot pose forward via the differential-drive kinematic model. The covariance is inflated by process noise :
where is the Jacobian of the motion model with respect to the state.
Update — measurement model
The LIDAR produces a point cloud that is processed through a perception pipeline — clustering, circle regression, and classification — to detect cylindrical landmarks and publish their relative positions on the map. These detections are what feed the measurement model. The Kalman gain then weights how much to trust the sensor versus the prediction:
where is the Jacobian of the measurement function .
SLAM in simulation
The nuslam package runs an EKF that maintains a joint state of the robot pose and all detected landmark positions . The filter supports two modes:
- Known data association — landmark IDs are provided directly by the simulator.
- Unknown data association — landmarks are matched to the existing map, with a distance threshold to initialize new landmarks.
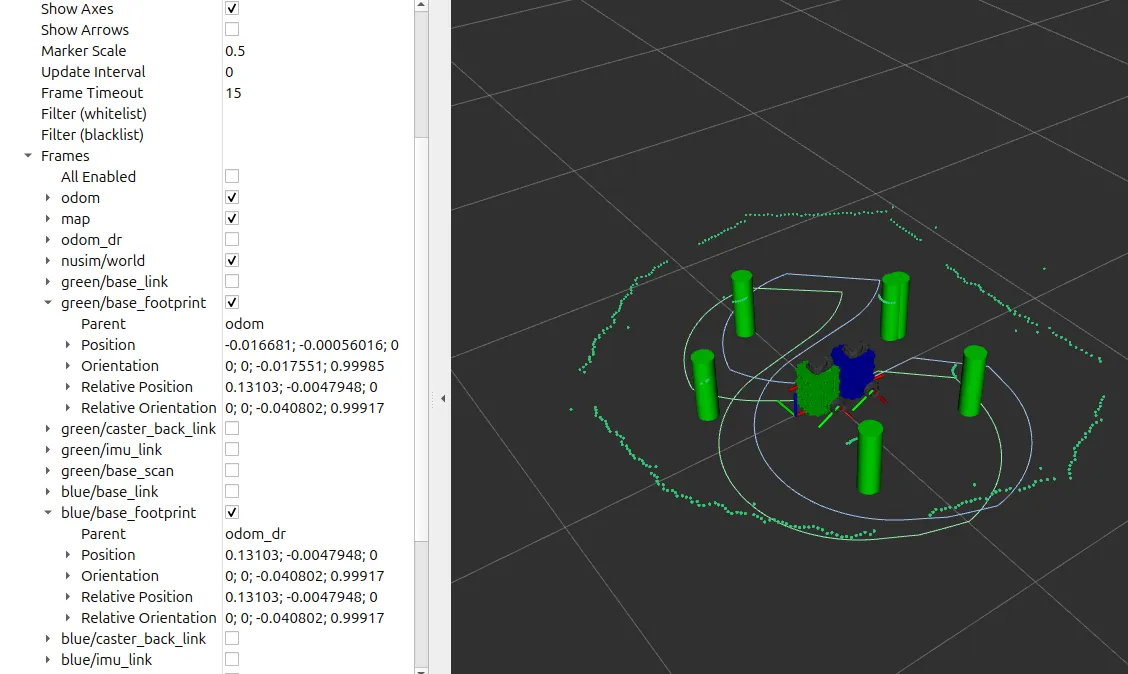
RViz displays the ground-truth robot, the SLAM estimate, the odometry estimate, and the estimated and actual landmark positions simultaneously.
SLAM in the real world
The filter was deployed on a physical TurtleBot3 navigating an environment of cylindrical landmarks. After a full loop, the SLAM estimate returned close to the origin while odometry had drifted significantly:
| Estimator | x (m) | y (m) | θ (rad) |
|---|---|---|---|
| SLAM | −0.016 | −0.001 | −0.018 |
| Odometry | 0.131 | −0.005 | −0.040 |