4WD platform with passive articulated chassis
I am building a stair-climbing platform with a 4-wheel-drive articulated chassis and soft airless wheels.
Flowheely overview
Flowheely is a driver-assisted stair-climbing platform (for wheelchairs, and potentially other applications) built around a 4WD articulated chassis with a passive yaw joint between front and rear bodies. The yaw joint lets the chassis curve around turning stairs while keeping all four soft airless wheels in driven contact with the steps.
I built this entire project from scratch. This includes mechanical design and fabrication, embedded systems, ROS 2 software architecture, control systems, and computer vision.
Off-the-shelf components include: onboard computer, motors and motor controllers, camera, IMU, encoders, and electrical components.
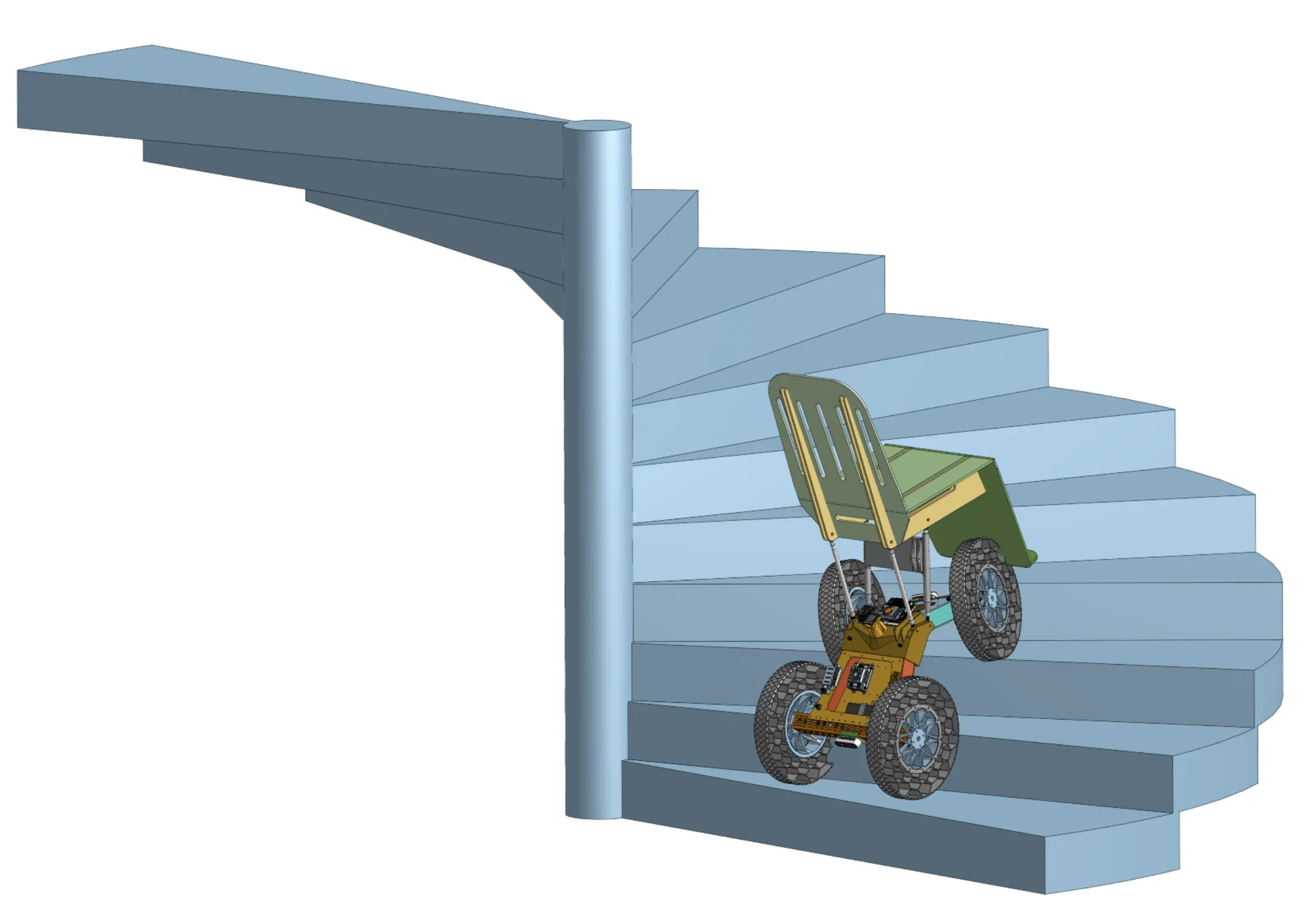
CAD: curved staircase climbing with the articulated chassis and self-leveling chair
Miniwheely (1/4-scale)
Miniwheely is a 1/4-scale platform built to validate the kinematics and the articulated-chassis concept before committing to the full-scale build.
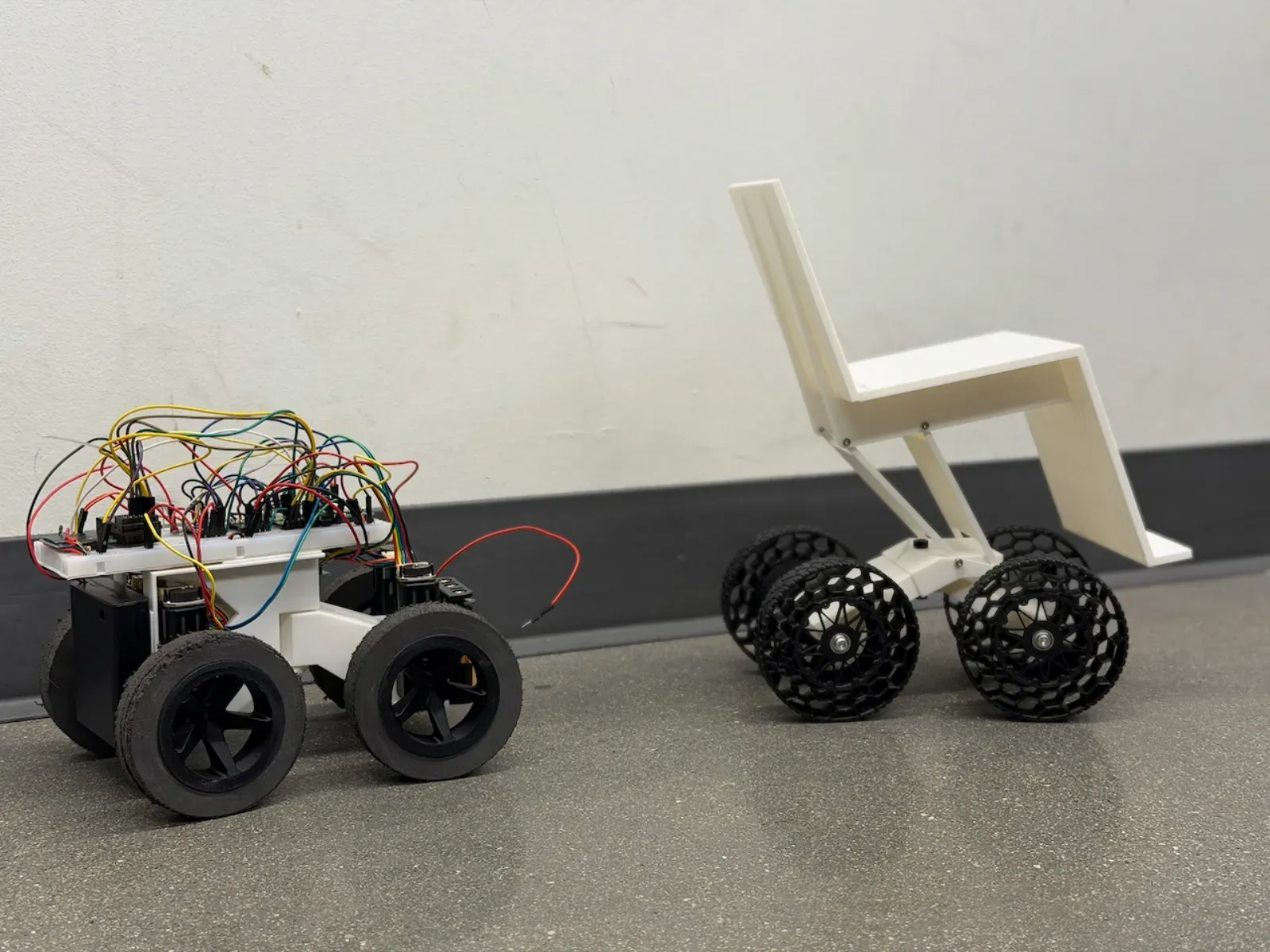
Miniwheely (left) and the full-scale Flowheely chassis (right)
Closed-loop yaw-joint control
Full-scale integration
Full-scale mechanical and electrical integration is done. The safety system and control architecture are validated. Next steps include testing on real stairs with the full-size wheels.
A full simulation in Gazebo has been built to allow for fast development of the control, vision, and path-planning components of the system.
The robot is controllable with several methods: webapp, gamepad, keyboard. A Foxglove telemetry tool has been built for navigation and control debugging.
Full-scale platform test drive (small wheels)
Gazebo simulation and webapp control
Driving up and down the stairs
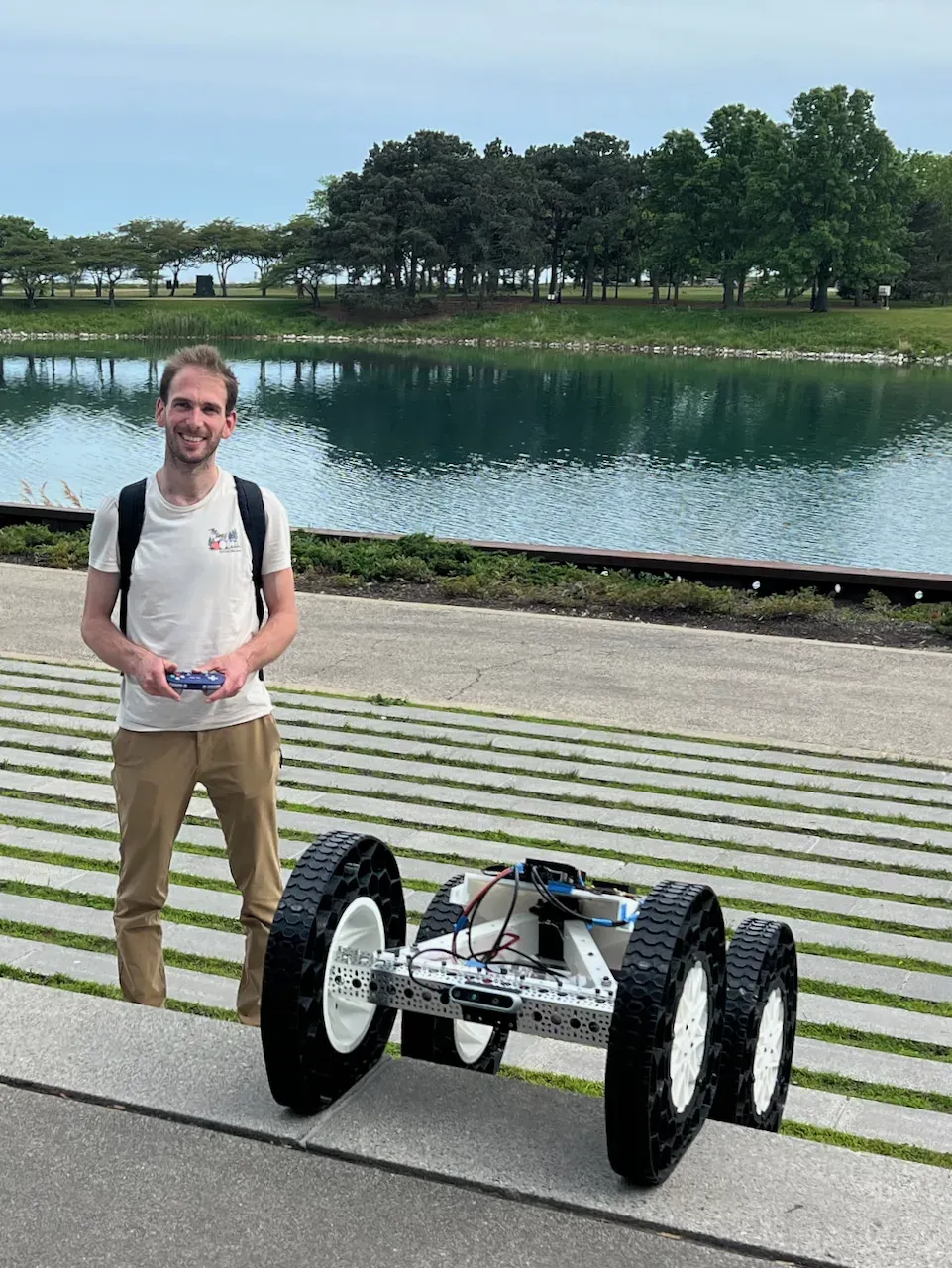
Full-scale Flowheely with the full-size wheels.
It’s a wheelchair!

Full-scale platform